百度創始人李彥宏在季度高管會上發表內部演講,宣布百度旗下自動駕駛出行服務平臺“蘿卜快跑”將徹底放棄多傳感器融合路線,全面轉向純視覺技術方案。這一戰略調整被李彥宏視為“與時間賽跑的關鍵決策”,直言“若不能在
多傳感器融合路線:以激光雷達、攝像頭、毫米波雷達等硬件堆疊實現環境感知,代表企業為Waymo、百度蘿卜快跑(第六代車型仍配備激光雷達);
純視覺路線:僅依賴攝像頭與AI算法,通過“BEV+Transformer+OCC(占用網絡)”架構模擬人類視覺,代表企業為特斯拉。
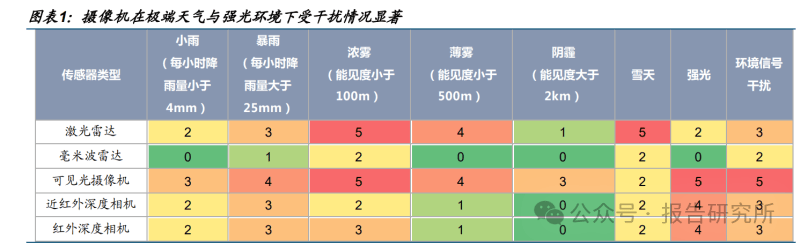
李彥宏在演講中坦言,百度此前堅持多傳感器路線,但硬件成本高企成為商業化瓶頸。以蘿卜快跑車隊為例,激光雷達與計算平臺占整車成本的60%(約18萬元),需持續運營5年才能攤薄投入,而安全員薪資更吞噬45%的訂單收入。此外,雨霧天氣下傳感器30%的失效率暴露技術缺陷,導致武漢等試點城市出現車輛“僵停”、認不出塑料袋等場景,用戶體驗受損。
相比之下,純視覺路線萬元以下,且依托百度Apollo數據閉環體系,算法能以“周更”速度迭代優化。李彥宏強調:“純視覺不是妥協,而是用AI能力彌補硬件短板。百度與吉利合作的極越汽車已驗證這一路徑——其純視覺方案支持全國300余個城市城區道路,并在2024年中國智駕大賽城市NOA賽中奪冠。”
盡管面臨技術爭議,蘿卜快跑仍是中國Robotaxi市場的領跑者。截至2025年7月,其運營車隊規模超2000輛,累計服務超1100萬次,并在武漢等城市實現“UE(單位經濟模型)轉正”,即單均收入覆蓋成本。
然而,李彥宏指出,當前商業模式仍脆弱:每車日均200GB環境數據的合規存儲成本占營收20%,72%用戶拒絕乘坐無安全員車輛,而《道路交通安全法》尚未明確L4級事故責任劃分,企業被迫承擔無限連帶風險。
必一運動sport網頁版登錄
“特斯拉的純視覺Robotaxi兩周內發生剮蹭事故,美國監管部門已介入調查,這證明極端場景下視覺方案的局限性。”李彥宏坦言,“但特斯拉的優勢在于數據規模——其車隊每日產生數億公里真實路測數據,而百度需通過純視覺路線年前無法將蘿卜快跑擴張至10萬輛規模,形成數據壁壘,我們將被特斯拉甩開代際差距。”
必一運動sport網頁版登錄
技術經濟性失衡:麥肯錫報告顯示,中國Robotaxi市場需同步實現硬件成本壓縮、國家級責任認定法案出臺、封閉場景先行三大條件,否則商業閉環難以持續;
政策滯后性:地方審批需經12個部門協同,而交通部、工信部、公安部對遠程安全員資質標準仍未統一;
社會接受度:艾瑞調研顯示,僅28%用戶愿意接受無安全員車輛,網約車司機抗議潮更凸顯就業替代風險。
2025年底前:完成武漢、北京、上海等核心城市純視覺車隊部署,目標日均訂單突破50萬單;
2026年:推動《自動駕駛汽車責任認定條例》立法,明確車企、運營商、用戶權責;
2027年:啟動出海計劃,依托迪拜、東京、新加坡等地的政策紅利,復制中國模式。
百度轉向純視覺已引發連鎖反應。滴滴自動駕駛被曝暫停激光雷達采購,轉而研發“輕量級視覺方案”;小鵬汽車董事長何小鵬在社交媒體發文:“視覺是自動駕駛的終極形態,激光雷達只是過渡。”而特斯拉CEO馬斯克則回應稱:“歡迎百度加入純視覺陣營,但數據規模決定勝負。”
麥肯錫全球董事合伙人彭波分析:“若百度能證明純視覺在復雜城市路況中的可靠性,全球Robotaxi市場將加速向‘去激光雷達’演進。但這一路線需跨越兩座大山:一是突破長尾場景(如極端天氣、罕見障礙物)的識別精度;二是說服監管部門放寬L4級車輛準入標準。”
截至發稿,蘿卜快跑已開始拆除第六代車型上的激光雷達,首批純視覺測試車將于8月在武漢光谷上路。這場由百度點燃的技術路線之爭,或將重新定義自動駕駛的未來格局。