
輔助開車的前向駕駛輔助攝像系統(tǒng)是什么?
一說到車上用的攝像頭,大家可能第一反應(yīng)就是倒車影像用的攝像頭,因為它應(yīng)該算是最早應(yīng)用到車上的攝像頭了。而隨著近幾年汽車的井噴式發(fā)展,車載攝像頭可謂是層出不窮,應(yīng)用領(lǐng)域也越來越廣,比如行車記錄儀(防碰瓷專用)、變道輔助(彌補后視鏡盲區(qū))、駐車輔助(全車環(huán)視)等。而針對如此多的攝像頭,小編將其視角的不同簡單分為:前視、后視、環(huán)視、車內(nèi)監(jiān)控四部分。
前向駕駛輔助作為先進駕駛輔助ADAS的重要組成部分,一般包括自動緊急剎車AEB,車道偏離報警LDW,車道保持輔助LKA,交通標志識別TSR,遠光燈輔助HBA,自適應(yīng)巡航ACC等。其實,對于前向駕駛輔助這一塊,國際上比較知名的測試機構(gòu)也制定了相關(guān)的測試及評價規(guī)則,像城市工況的AEB City和郊區(qū)工況的AEB inter-Urban已經(jīng)明確納入2014年歐洲新車評價E-NCAP的評分項中。不得不承認,汽車正在朝著自動駕駛的方向發(fā)展。那么,攝像頭又在前向駕駛輔助系統(tǒng)中扮演著什么樣的角色呢?請各位順著小編的思路先往車的前方風(fēng)玻璃上方看。為了方便,用于前向駕駛輔助的攝像頭以下統(tǒng)一簡稱為前攝像頭。

前攝像頭的主要目的是看到前方的道路車輛行人等信息。都說站得高,看得遠,但是前攝像頭位置高的原因卻是要保證看到盡可能近的地方(由于前引擎蓋會造成盲區(qū)的原因)。當(dāng)然啦,位置太高或者太低都是不行的,適合本車的才是最重要的。裝的太高了,突然鳥屎落在擋風(fēng)玻璃正好擋住攝像頭,雨刮清理不到那個位置那豈不是就成瞎子了。。。

前攝像頭系統(tǒng)一般有獨眼龍式和兩只眼式(仿生學(xué)設(shè)計)兩種。獨眼龍式,只有一個攝像頭,整個模塊橫向體積小,內(nèi)部計算量小,成本低,缺點比較明顯:對于距離不明感,大家可以試著閉上一只眼,然后拿根線穿針,保證比兩只眼都睜著穿得慢,而且單眼操作很有可能會發(fā)生線永遠都穿不進去的尷尬場面。。。兩只眼式則對于距離判斷比較精確(前面操作已經(jīng)證實),由于兩個攝像頭之間要保證一定的距離,所以存在橫向體積較大、兩個圖像的綜合運算復(fù)雜和成本高的問題。
獨眼龍在一些不需要精確距離信息的功能上可以說是最優(yōu)的方案,因此,獨眼龍有她存在的理由,兩只眼的請不要嘲笑她。
前攝像頭可實現(xiàn)的功能,首先要有個前提,光線充足,天氣良好,因為光線較暗以及大雨、霧霾、大雪等惡劣天氣將使得系統(tǒng)性能大大降低。有了大前提后,正式開始介紹前攝像頭可實現(xiàn)的功能。
VO_ACC:自適應(yīng)巡航控制ACC是在傳統(tǒng)的巡航控制CC的基礎(chǔ)上發(fā)展而來的,它的先進性在于可以通過傳感器來實現(xiàn)探測與本車道前車之間的距離,然后按照設(shè)定好的最高時速和兩車之間的距離進行巡航。而在這里需要強調(diào)的是,VO_ACC并不是傳統(tǒng)的利用毫米波雷達實現(xiàn)的ACC,而是完全依靠前攝像頭來單獨實現(xiàn)此功能,簡稱為基于視覺自適應(yīng)巡航VO_ACC。目前,寶馬i3的前攝像頭(獨眼龍式)和斯巴魯傲虎的前攝像頭(兩只眼式)已經(jīng)率先采用了此項技術(shù),其核心分別為以色列Mobileye的EyeQ2芯片和日本日立公司的雙目立體攝像頭技術(shù)。

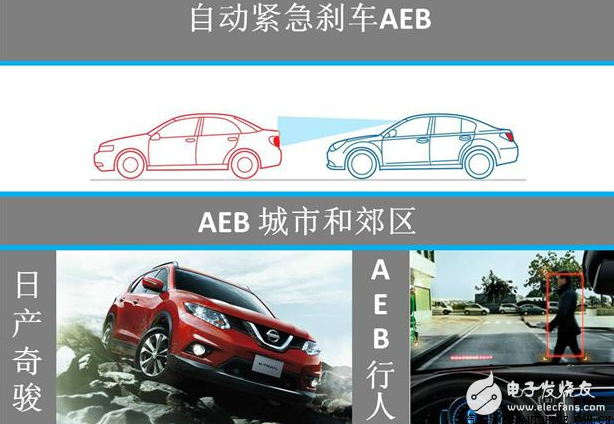
自動緊急剎車AEB分為行人、城市和郊區(qū)三種。AEB通過傳感器探測前方的車輛、行人等障礙物,如果發(fā)現(xiàn)距離過近且存在碰撞風(fēng)險時,進行自動制動。前碰撞報警FCW則可以理解為進行自動制動之前的預(yù)警功能。AEB行人是針對特定的識別目標行人,由于毫米波雷達和激光雷達對于行人的識別能力較弱,所以一般都會由前攝像頭來識別實現(xiàn),而AEB城市和AEB郊區(qū)則是針對不同的速度下對于車輛的自動制動。目前,前攝像頭也已經(jīng)能夠獨立完成AEB的三種功能。典型車型有寶馬i3、日產(chǎn)奇駿和斯巴魯傲虎,日產(chǎn)奇駿前攝像頭(獨眼龍式)同樣是基于以色列Mobileye EyeQ2芯片。
車道偏離報警LDW通過前攝像頭識別前方道路線信息,當(dāng)車輛發(fā)生無意識偏離時,系統(tǒng)發(fā)出報警。正因為功能相對簡單,所以LDW是前攝像頭應(yīng)用最早的功能。車道保持輔助LKA則是LDW的升級功能,可實現(xiàn)對于駕駛員的無意識偏離進行輔助糾正,使得車輛回到車道中。當(dāng)然,該功能會在自動判斷駕駛員的手是否離開方向盤,一旦雙手都離把,系統(tǒng)將給出報警音。

交通標志識別TSR通過前攝像頭識別前方的道路標志,比如:限速、解除限速、禁止通行等。系統(tǒng)通過儀表顯示出識別出的標志,并給出相應(yīng)的報警信息。特別是對于限速,一般會采用和GPS導(dǎo)航電子地圖數(shù)據(jù)融合的方式,當(dāng)特殊路段采用LED顯示屏來臨時降低限速值,此時就以攝像頭當(dāng)時識別到的信息為準,而當(dāng)攝像頭無法正常識別當(dāng)前限速標志時,又以GPS信息為準,從而來達到最為準確的限速信息。

遠光燈輔助HBA通過前攝像頭識別出對面來車和前方同向車輛,自動切換遠光燈到近光燈,從而避免對于其他車輛造成炫目。

通過以上介紹,相信大家已經(jīng)對于當(dāng)前前攝像頭能夠單獨完成的功能有了了解。面對如此多的功能,大家對其在中國大陸市場的應(yīng)用一定有著自己的看法。小編忍不住要說點:
1. ACC功能碰見個加塞的,估計追尾是在所難免了,畢竟系統(tǒng)識別加塞車輛是需要反映時間的。
2. AEB功能能識別我們的“改裝車”么?能識別我們的三輪車么?能識別我們的電瓶車么?能識別我們的老年代步類似汽車的小電瓶車么?
3. LDW初衷是好的,但是到了我們這,車道線真的可以正常識別么,相比很多時候系統(tǒng)都是出于無法正常識別的狀態(tài)。其實在美國,LDW功能也出現(xiàn)過很多頻繁報警的抱怨,客戶經(jīng)常會關(guān)閉LDW功能。
4. TSR感覺也是在我們這很難做到完善,因為我們的限速牌啥樣子都有,規(guī)范程度遠不如歐美,線. HBA這個功能估計也會被頻繁禁止,畢竟國內(nèi)遠光燈使用不規(guī)范屢有發(fā)生,對面遠光燈而自己近光燈實在是讓某些人有點受不了。所有車都配HBA功能也解決不了問題,駕駛員不知道怎么開或者根本就不想開也就等于沒有配該功能。因此,提高駕駛員的素質(zhì)才是解決的最好辦法。
在前攝像頭可以實現(xiàn)的前向駕駛輔助中,不同的車廠有著自己不同的策略。有的完全只依靠前攝像頭,有的則是結(jié)合其他傳感器來融合,典型的車廠有:斯巴魯兩只眼式攝像頭,日產(chǎn)獨眼龍式攝像頭,沃爾沃獨眼龍式攝像頭+毫米波雷達+激光雷達,奔馳兩只眼式攝像頭+毫米波雷。從使用的角度,小編認為前攝像頭單獨實現(xiàn)全功能更好,因為就算有個追尾,也不用擔(dān)心裝在前進氣格柵的毫米波雷達被撞壞(毫米波雷達不是普通的倒車用的超聲波雷達,成本較高),然而,從安全的角度,光線不足或惡劣天氣下,毫米波雷達/激光雷達又可以彌補攝像頭的不足,從而提高了功能的可靠性。綜上所述,小編認為多傳感器融合是未來前向駕駛輔助的發(fā)展方向。








